
كيف تشتغل محركات الدرون (الـ quad) ولماذا تُغيّر سرعاتها بهذه الطريقة، وأصحح اللبس بين الـ roll والـ yaw لأن الجملة اللي ذكرتها تحاكي الـ roll أكثر منها الـ yaw.
1) التهيئة (توزيع المحركات واتجاه الدوران)
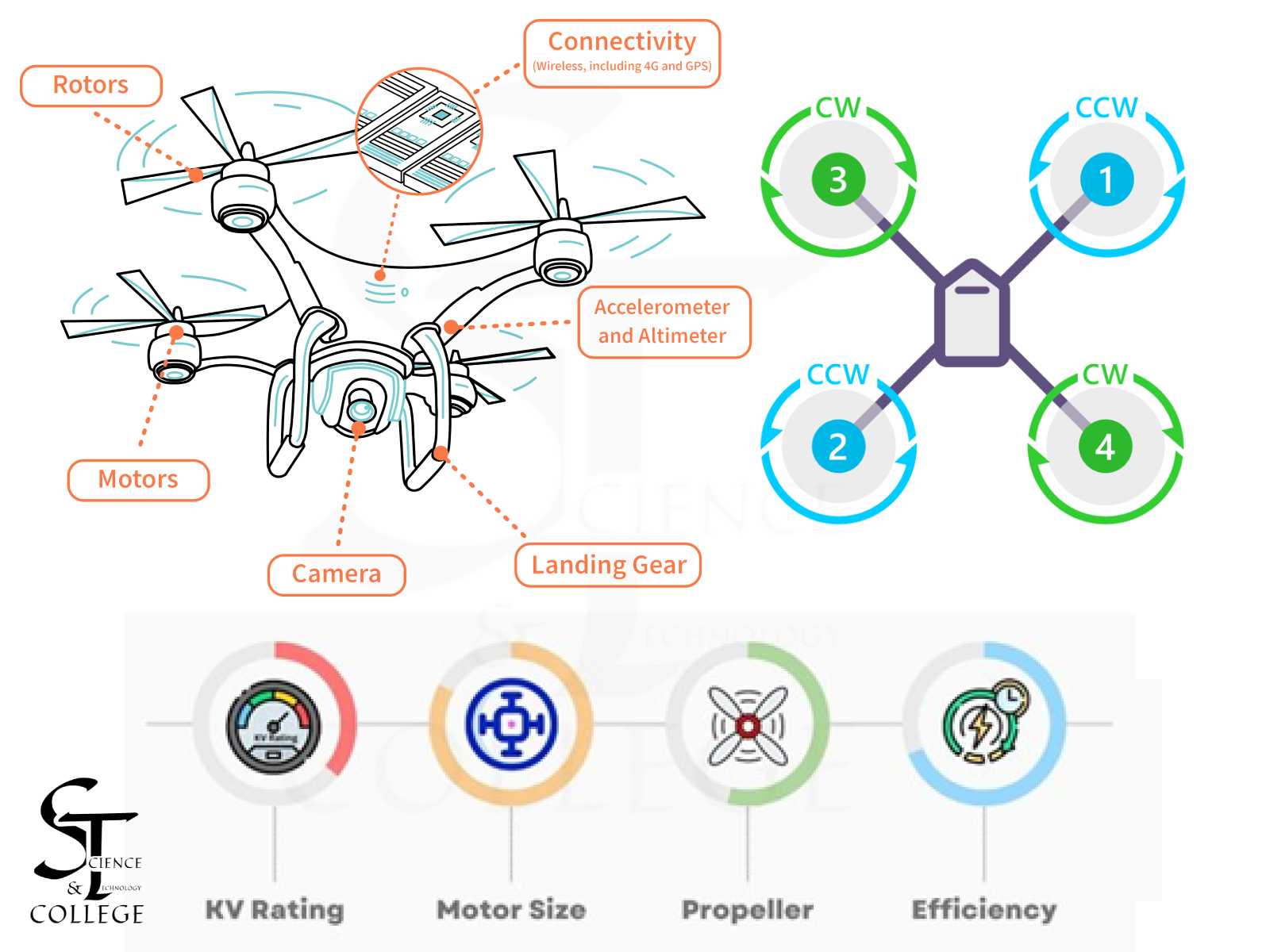
أنت كتبت التوزيع التالي — نستخدمه في الشرح:
- الأمامي الأيسر (FL) → يدور CW (باتجاه عقارب الساعة)
- الأمامي الأيمن (FR) → يدور CCW (عكس عقارب الساعة)
- الخلفي الأيسر (RL) → يدور CCW
- الخلفي الأيمن (RR) → يدور CW
السبب: زوجان يدوران CW والزوج الآخر CCW ليُلغوا (تقريبًا) عزم الدوران الناتج عن دوران المراوح عند الطيران المستقر.
2) القوى والعزوم الأساسية (ببساطة)
- كل محرك يعطي رفع (Thrust) عمودي إلى الأعلى: TiT_i.
- مجموع الرفع Ttot=∑TiT_{tot}=\sum T_i يحدد إن الدرون يصعد أو يهبط.
- تغيّر التوزيع بين المحركات يخلق عزوم حول المحاور:
- Roll (محور X) = فرق الرفع بين الجهة اليمنى واليسرى → يَميل الجسم إلى اليمين أو الشمال.
- Pitch (محور Y) = فرق الرفع بين الأمام والخلف → الأنف ينخفض أو يرتفع.
- Yaw (محور Z) = نتيجة عزوم الهواء/عزم المحركات (التفاعل الناتج عن دوران المراوح) → يسجّل دوران حول المحور العمودي.
مهم: الرفع TT يتناسب تقريبًا مع مربع سرعة الموتور ω\omega: T≈kTω2T \approx k_T \omega^2. كذلك عزم السحب (الذي يسبب yaw) تقريبًا Q≈kQω2Q \approx k_Q \omega^2.
3) تحكّم الطيّار (المدخلات الأساسية) وكيف تُترجم لتغيّر في سرعات المحركات
أ. الغِطاء العام — الارتفاع (Throttle):
- لزيادة الارتفاع: نزيد سرعة جميع المحركات بنفس المقدار → TtotT_{tot} يزيد.
- للنزول: ننقص سرعة الجميع.
ب. الـ Pitch (للأمام / للخلف):
- للحركة للأمام (nose down / pitch forward): نزيد سرعة المحركين الخلفيين (RL, RR) وننقص سرعة الأماميين (FL, FR).
النتيجة: الرفع الخلفي أكبر → الجسم يميل للأمام وتتحول قوة الرفع إلى مكون أمامي يدفع الدرون للأمام. - للعكس (التراجع): نزيد الأماميين وننقص الخلفيين.
ج. الـ Roll (الانحراف يمين/يسار — bank):
- للانحراف لليمين (roll right — الجهة اليمنى تنخفض): نزيد سرعة المحركين على اليسار (FL, RL) وننقص سرعة اليمين (FR, RR).
النتيجة: اليسار يرتفع واليمين ينخفض → الدرون يميل لليمين ويبدأ يتحرك جانبياً إذا واصل الميل. - للانحراف لليسار: العكس.
ملاحظة: الحركة الأفقية (تقدم/تأخر/انحراف) عادة تُنفّذ عن طريق إمالة الدرون (pitch/roll) ثم استغلال مركبة الرفع لتحقيق الحركة الأفقية.
د. الـ Yaw (تدوير حول المحور العمودي — الدوران يمين/يسار):
- هنا لا نغيّر مجموع الرفع (لا نريد أن نصعد أو نهبط أثناء الـ yaw). بل نغيّر توزيع العزم الناتج عن دوران المراوح.
- فكرة بسيطة: المحركات التي تدور باتجاه واحد تولّد عزماً حول المحور العمودي في اتجاه، والمحركات التي تدور بالعكس تولّد عزماً في الاتجاه المقابل. إذا زدنا سرعة المحركات التي تدور في اتجاه واحد وخفّضنا سرعات التي تدور بالعكس بنفس المقدار، نحصل على عزم صافي يدير الدرون بدون تغيير كبير في الارتفاع.
- مع التوزيع عندنا: CW = {FL, RR} و CCW = {FR, RL}.
- لـ yaw لليمين (دوران عقارب الساعة من الأعلى): نزيد سرعة المحركات التي تُنتج عزمًا باتجاه عقارب الساعة وننقص الأخرى. عمليًا — إذا اعتبرنا المعادلات — لعمل دوران لليمين نزيد سرعة المحركين اللذين يدوران بطبيعة CCW (FR, RL) وننقص سرعة FL وRR بحيث يبقى مجموع الرفع ثابتًا.
- الخلاصة العملية: لتدوير الدرون حول نفسه (yaw) نعدل السرعات بين المحركات ذات اتجاه الدوران المختلف، عادة بتعديل زوجين على القطر (diagonal) لا بتعديل جهة واحدة كاملة — لأن تغيير جهة كاملة (مثلاً زيادة اليسار كامل) سيعطي roll غير مرغوب فيه.
4) لماذا نغيّر أزواجًا على القطر (diagonal) أثناء الـ yaw؟
لأن لو زدت محركي جهة واحدة فقط (مثلاً كلا اليسار)، ستحصل على مزيج من roll + yaw — أي يميل الدرون ويبدأ يدور. لو استخدمت زوجًا قطريًا (مثلاً front-right و rear-left) فإن تأثير الرفع يتوازن (أحدها أمامي والآخر خلفي) فلا يحصل فرق كبير في pitch أو roll، لكن يولدان معًا عزمًا صافي حول المحور Z → نظيف للـ yaw.
مثال عملي للـ yaw (حفظ الارتفاع):
- زيادة FR و RL بمقدار +Δ (كل واحد)
- تقليل FL و RR بمقدار -Δ (كل واحد)
مجموع التغير في الرفع = +Δ + +Δ – Δ – Δ = 0 → لا تغيير في الارتفاع الإجمالي، لكن عزم الـ yaw ≠ 0.
5) مصفوفة المزج (mixing) المختصرة — كيف يحسب الطيار أو الفلايت كنترولر أوامر المحركات؟
الطيار الداخلي (flight controller) يستقبل أربع أوامر: Throttle, Roll, Pitch, Yaw (u_t, u_r, u_p, u_y) ثم يحسب كل محرك كـمزيج خطّي (مبسّط):
باستخدام الترتيب عندنا (FL, FR, RL, RR) ومُفترض تعريف الإشارات كما يلي:
- roll: موجبة تعني انحراف لليمين (left motors ↑)
- pitch: موجبة تعني انحدار للأمام (rear motors ↑)
- yaw: موجبة تعني دوران CCW
مثال صيغة مبسطة (واحد من التعريفات الشائعة):
M_FL = Thr + (+Roll) + (-Pitch) + (+Yaw)
M_FR = Thr + (-Roll) + (-Pitch) + (-Yaw)
M_RL = Thr + (+Roll) + (+Pitch) + (-Yaw)
M_RR = Thr + (-Roll) + (+Pitch) + (+Yaw)
(الاتجاهات والعلامات تعتمد على تعريفات النظام لديك — لكن الفكرة: كل محرك يأخذ مزيجًا من الإشارات الأربعة.)
6) أمور عملية ونصائح مهمة
- اتجاه المراوح مهم جدًا: كل مروحة لها وجه/زاوية شفرات مخصص لدوران معين. تركيب مروحة بعكس اتجاهها سيؤدي إلى فقدان الرفع أو انقلاب الدرون.
- المحركات تُدار بواسطة ESC (أجهزة التحكم بالسرعة) التي تستقبل إشارة PWM/تماثلها من الفلايت كنترولر.
- الفلايت كنترولر يقرأ بيانات الجيروسكوب/المغناطيس/الإكسلروميتر ويطبق حلقات PID لتعديل سرعات المحركات آلاف المرات بالثانية لتثبيت الدرون.
- عند تنفيذ yaw، الكنترولر يعوّض أي فرق في الرفع الناتج بضبط متوسط السرعات حتى يحافظ على الارتفاع.
- مرونة الخلط: لأن الرفع ∝ ω²، التغيرات الصغيرة في ω تغير الرفع؛ لذلك التعديل يكون دقيقًا وغير متماثل عادة.
- مركز الثقل يجب أن يكون قريب من مركز المراوح؛ انحرافه يجعل التحكم أصعب.
7) جدول سريع للمرجع (تغييرات السرعات)
(Δ = زيادة، −Δ = نقصان)
- صعود: FL +Δ, FR +Δ, RL +Δ, RR +Δ
- هبوط: كل المحركات −Δ
- تقدم (pitch forward): FL −Δ, FR −Δ, RL +Δ, RR +Δ
- تراجع (pitch back): FL +Δ, FR +Δ, RL −Δ, RR −Δ
- انحراف يمين (roll right): FL +Δ, RL +Δ, FR −Δ, RR −Δ
- دوران يمين (yaw right — الدوران حول المحور Z باتجاه عقارب الساعة): زيادات على المحركات ذات اتجاه دوران واحد وتخفيض على المحركات ذات الاتجاه المعاكس — بمطابقتنا: FR +Δ, RL +Δ, FL −Δ, RR −Δ (وهكذا يبقى الرفع الكلّي ثابتًا).
الخلاصة المختصرة
- حركة الصعود/الهبوط = تغيير في سرعات كل المحركات.
- pitch و roll تُجرى بتغيير ثنائي لزوجي الأمام/خلف أو يمين/يسار.
- yaw يُجرى بتغيير سرعات المحركات بحسب اتجاه دورانها (CW vs CCW)، عادة بتعديل زوجين قطريين للحفاظ على توازن الـ pitch/roll والارتفاع.
- الفلايت كنترولر يقوم بالحبكات الدقيقة (PID + mixing) لضمان أن تغييرات السرعات تنتج الحركة المطلوبة فقط دون إحداث اهتزازات أو فقدان ارتفاع.




